What is the MCP2515?
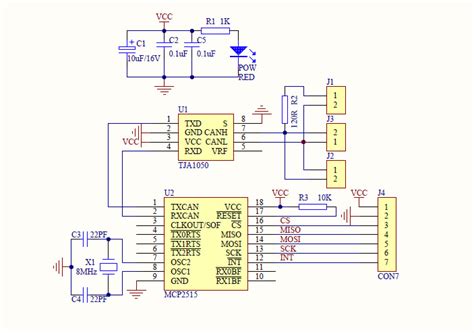
The MCP2515 is a stand-alone CAN controller developed by Microchip Technology. It is designed to simplify the implementation of CAN communication in embedded systems. The MCP2515 supports CAN 2.0A and CAN 2.0B protocols, making it compatible with a wide range of CAN networks.
Key Features of the MCP2515
- Supports CAN 2.0A and CAN 2.0B protocols
- SPI interface for easy integration with microcontrollers
- 3 transmit buffers and 2 receive buffers
- Data rate up to 1 Mbps
- Low power consumption
- Industrial temperature range (-40°C to +85°C)
MCP2515 Pinout
The MCP2515 is available in 18-pin PDIP, SOIC, and TSSOP packages. The following table shows the pinout for the MCP2515:
| Pin | Name | Description |
|---|---|---|
| 1 | TXCAN | Transmit CAN output |
| 2 | RXCAN | Receive CAN input |
| 3 | CLKOUT | Clock output |
| 4 | TX0RTS | Transmit buffer 0 request-to-send input |
| 5 | TX1RTS | Transmit buffer 1 request-to-send input |
| 6 | TX2RTS | Transmit buffer 2 request-to-send input |
| 7 | OSC2 | Oscillator output |
| 8 | OSC1 | Oscillator input |
| 9 | VSS | Ground |
| 10 | RX1BF | Receive buffer 1 full output |
| 11 | RX0BF | Receive buffer 0 full output |
| 12 | INT | Interrupt output |
| 13 | SCK | SPI clock input |
| 14 | SI | SPI data input |
| 15 | SO | SPI data output |
| 16 | CS | SPI chip select input |
| 17 | RESET | Reset input |
| 18 | VDD | Power supply |

Configuring the MCP2515
To configure the MCP2515, you need to write the appropriate values to its configuration registers via the SPI interface. The main configuration registers include:
- CNF1, CNF2, CNF3: These registers control the CAN bit timing and the synchronization jump width.
- CANCTRL: This register controls the CAN controller mode (normal, sleep, loopback, etc.) and the clock output.
- CANINTE, CANINTF: These registers control and flag the interrupts.
- RXB0CTRL, RXB1CTRL: These registers control the receive buffers.
- TXB0CTRL, TXB1CTRL, TXB2CTRL: These registers control the transmit buffers.
Example Configuration
Here’s an example of how to configure the MCP2515 for a 125 kbps CAN bus with an 8 MHz oscillator:
- Reset the MCP2515 by setting the RESET pin low.
- Set the CNF1, CNF2, and CNF3 registers for 125 kbps operation:
- CNF1 = 0x03
- CNF2 = 0xB8
- CNF3 = 0x05
- Set the CANCTRL register to normal mode and enable the clock output:
- CANCTRL = 0x04
- Configure the receive and transmit buffers as needed.
- Enable interrupts if desired by setting the appropriate bits in the CANINTE register.

Sending and Receiving CAN Messages
To send a CAN message using the MCP2515:
- Check if the desired transmit buffer is available by reading the TXBnCTRL register.
- Load the message ID, length, and data into the TXBnSIDH, TXBnSIDL, TXBnDLC, and TXBnDm registers (where n is the buffer number, and m is the data byte index).
- Set the TXREQ bit in the TXBnCTRL register to request transmission.
To receive a CAN message:
- Check the RXBnCTRL register to see if a message is available in the receive buffer.
- Read the message ID, length, and data from the RXBnSIDH, RXBnSIDL, RXBnDLC, and RXBnDM registers.
- Clear the RXFUL bit in the RXBnCTRL register to release the buffer.

Interfacing the MCP2515 with a Microcontroller
To interface the MCP2515 with a microcontroller, you need to connect the SPI pins (SCK, SI, SO, CS) and the INT pin (if using interrupts). Here’s an example of how to connect the MCP2515 to an Arduino Uno:
| MCP2515 Pin | Arduino Uno Pin |
|---|---|
| SCK | D13 (SCK) |
| SI | D11 (MOSI) |
| SO | D12 (MISO) |
| CS | D10 (SS) |
| INT | D2 |
| VDD | 5V |
| VSS | GND |
Example Code
Here’s a simple example of how to send a CAN message using the MCP2515 and an Arduino Uno:
#include <SPI.h>
#include <mcp2515.h>
MCP2515 mcp2515(10);
void setup() {
SPI.begin();
mcp2515.reset();
mcp2515.setBitrate(CAN_125KBPS, MCP_8MHZ);
mcp2515.setNormalMode();
}
void loop() {
can_frame frame;
frame.can_id = 0x123;
frame.can_dlc = 4;
frame.data[0] = 0xFF;
frame.data[1] = 0xAA;
frame.data[2] = 0x55;
frame.data[3] = 0x00;
mcp2515.sendMessage(&frame);
delay(1000);
}
Troubleshooting
If you encounter issues while working with the MCP2515, here are some common problems and their solutions:
- No communication: Check the wiring and make sure the SPI pins are connected correctly. Verify that the MCP2515 is properly powered and the RESET pin is not being held low.
- CAN bus errors: Ensure that the MCP2515 is configured correctly for your CAN bus (bit rate, propagation delay, etc.). Check the termination resistors on the CAN bus.
- Intermittent data: Verify that the MCP2515 is not being overloaded with too many messages. Ensure that the CAN bus is not experiencing electromagnetic interference.
FAQ
-
Q: Can the MCP2515 be used with 3.3V microcontrollers?
A: Yes, the MCP2515 is 5V tolerant on the SPI pins, so it can be used with 3.3V microcontrollers without level shifters. -
Q: What is the maximum data rate supported by the MCP2515?
A: The MCP2515 supports data rates up to 1 Mbps. -
Q: How many CAN messages can the MCP2515 buffer?
A: The MCP2515 has 3 transmit buffers and 2 receive buffers, each capable of storing one CAN message. -
Q: Can the MCP2515 be used in high-temperature environments?
A: Yes, the MCP2515 is rated for operation in the industrial temperature range of -40°C to +85°C. -
Q: Is the MCP2515 compatible with CAN FD (Flexible Data Rate)?
A: No, the MCP2515 does not support CAN FD. For CAN FD applications, consider using the MCP2517FD or MCP2518FD controllers.
Conclusion
The MCP2515 is a versatile and easy-to-use CAN controller that simplifies the implementation of CAN communication in embedded systems. By understanding its features, pinout, configuration, and how to send and receive messages, you can effectively integrate the MCP2515 into your projects. With its wide compatibility and robust performance, the MCP2515 is an excellent choice for a variety of CAN applications.
No responses yet