Introduction to Pixhawk 4
The Pixhawk 4 is a cutting-edge flight controller designed for high-performance drones and unmanned aerial vehicles (UAVs). Developed by the PX4 team, the Pixhawk 4 builds upon the success of its predecessors, offering enhanced features, improved performance, and increased reliability. This advanced flight controller is capable of handling a wide range of drone applications, from recreational flying to professional aerial photography and mapping.
Key Features of Pixhawk 4
- Powerful processing: The Pixhawk 4 is equipped with a high-performance STM32F765 microcontroller, providing ample processing power for complex flight control tasks.
- Multiple connectivity options: With support for CAN, UART, I2C, and SPI interfaces, the Pixhawk 4 can connect to a variety of sensors, peripherals, and communication modules.
- Redundant power supply: The flight controller features a redundant power supply architecture, ensuring uninterrupted operation even in the event of a power failure.
- Improved sensor integration: The Pixhawk 4 supports a wide range of sensors, including GPS, magnetometer, barometer, and accelerometer, enabling precise navigation and flight stability.
- Extensive software support: The flight controller is compatible with popular open-source flight control software, such as PX4 and ArduPilot, providing a high degree of customization and flexibility.
Hardware Specifications
Processor and Memory
The Pixhawk 4 is powered by an STM32F765 microcontroller, which features:
- 32-bit ARM Cortex-M7 core
- 216 MHz clock speed
- 2 MB flash memory
- 512 KB RAM
This powerful processor enables the flight controller to handle complex algorithms and data processing tasks with ease.
Connectivity Options
The Pixhawk 4 offers a wide range of connectivity options, allowing it to interface with various sensors, peripherals, and communication modules:
| Interface | Quantity |
|---|---|
| CAN | 2 |
| UART | 4 |
| I2C | 2 |
| SPI | 2 |
| USB | 1 |
These interfaces provide ample flexibility for integrating the flight controller with other components of the drone system.
Sensor Integration
The Pixhawk 4 supports a comprehensive array of sensors, enabling accurate navigation and flight stability:
- GPS: The flight controller is compatible with both GPS and GLONASS satellite navigation systems, providing precise position and velocity data.
- Magnetometer: An integrated magnetometer allows for accurate heading determination and navigation.
- Barometer: The on-board barometer provides altitude information for stable vertical flight control.
- Accelerometer and Gyroscope: The Pixhawk 4 features a high-performance 6-axis accelerometer and gyroscope, enabling accurate attitude estimation and flight stabilization.

Software and Firmware
PX4 Autopilot
The Pixhawk 4 is designed to work seamlessly with the PX4 Autopilot, an open-source flight control software stack. PX4 provides a comprehensive set of features and capabilities, including:
- Autonomous flight modes: PX4 supports various autonomous flight modes, such as waypoint navigation, loiter, and return-to-home, allowing for hands-free operation of the drone.
- Sensor fusion: The software combines data from multiple sensors using advanced algorithms, providing accurate state estimation and flight control.
- Extensible architecture: PX4’s Modular design allows for easy integration of custom modules and plugins, enabling developers to extend the functionality of the flight controller.
ArduPilot Compatibility
In addition to PX4, the Pixhawk 4 is also compatible with ArduPilot, another popular open-source flight control software. ArduPilot offers similar features and capabilities to PX4, providing users with a choice of software platforms based on their specific requirements and preferences.

Applications and Use Cases
The Pixhawk 4 is suitable for a wide range of drone applications, including:
- Aerial photography and videography: The flight controller’s advanced features and stable flight characteristics make it ideal for capturing high-quality aerial footage.
- Mapping and surveying: With its precise navigation capabilities and support for high-resolution sensors, the Pixhawk 4 is well-suited for aerial mapping and surveying applications.
- Search and rescue: The flight controller’s autonomous flight modes and extended range make it a valuable tool for search and rescue operations.
- Precision agriculture: The Pixhawk 4 can be used in agricultural drones for tasks such as crop monitoring, irrigation management, and pest detection.
- Research and development: The flight controller’s open-source nature and extensible architecture make it an excellent platform for research and development in the field of drone technology.
Integration and Setup
Wiring and Connections
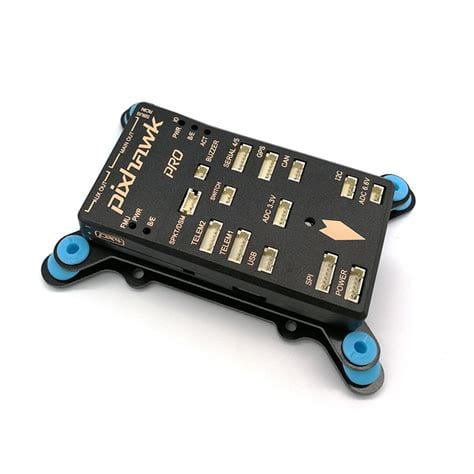
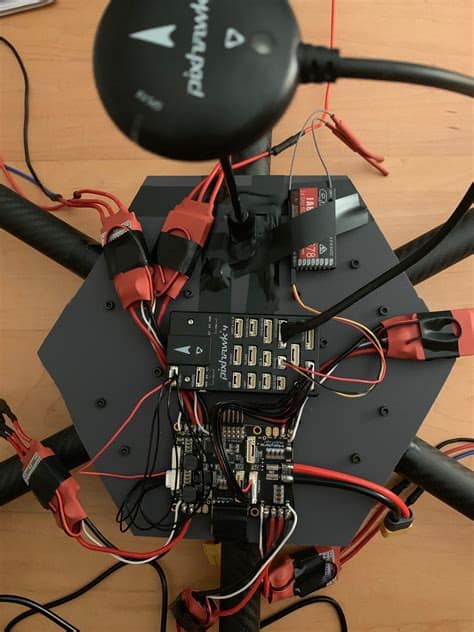
Integrating the Pixhawk 4 into a drone system involves connecting various components, such as motors, ESCs, sensors, and communication modules. The flight controller provides clear labeling and documentation for each port and interface, making the wiring process straightforward.
Configuration and Calibration
Before flying, the Pixhawk 4 must be properly configured and calibrated. This process involves:
- Firmware installation: The appropriate firmware (PX4 or ArduPilot) must be installed on the flight controller.
- Sensor calibration: Sensors such as the magnetometer, accelerometer, and gyroscope must be calibrated to ensure accurate readings.
- Radio and telemetry setup: The radio control system and telemetry links must be configured and tested.
- Flight mode configuration: The desired flight modes and their associated parameters must be set up in the flight control software.
Detailed instructions and guides for configuration and calibration are available in the official documentation for PX4 and ArduPilot.
Performance and Reliability
Flight Performance
The Pixhawk 4 offers exceptional flight performance, with fast response times, accurate navigation, and stable flight characteristics. The flight controller’s powerful processor and advanced algorithms enable it to handle demanding flight scenarios, such as high-speed maneuvers and strong wind conditions.
Redundancy and Failsafe Mechanisms
To ensure the safety and reliability of the drone system, the Pixhawk 4 incorporates various redundancy and failsafe mechanisms:
- Redundant power supply: The flight controller features a backup power supply that automatically takes over in the event of a primary power failure.
- Failsafe modes: The Pixhawk 4 supports configurable failsafe modes, such as return-to-home and auto-land, which are triggered when communication with the ground control station is lost or when critical errors occur.
- Error detection and handling: The flight control software continuously monitors the system for errors and anomalies, taking appropriate actions to maintain safe operation.
These features contribute to the overall reliability and robustness of the drone system, minimizing the risk of accidents and failures.
Community and Support
Official Documentation
The PX4 and ArduPilot communities provide extensive documentation for the Pixhawk 4, covering topics such as installation, configuration, and usage. These resources are continuously updated and expanded by the developer community, ensuring that users have access to the most current and accurate information.
Forums and Support Channels
Users of the Pixhawk 4 can find support and engage with the community through various forums and channels:
- PX4 Forums: The official PX4 forums provide a platform for users to ask questions, share experiences, and discuss best practices.
- ArduPilot Forums: The ArduPilot forums offer a similar community-driven support environment for users of the ArduPilot software.
- GitHub Issues: Both PX4 and ArduPilot maintain GitHub repositories where users can report bugs, suggest improvements, and contribute to the development of the flight control software.
These community resources are invaluable for troubleshooting, learning, and staying up-to-date with the latest developments in the Pixhawk 4 ecosystem.
Future Developments and Enhancements
The Pixhawk 4 is part of an active and evolving ecosystem, with ongoing developments and enhancements driven by the PX4 and ArduPilot communities. Some of the areas where future improvements are expected include:
- Sensor fusion algorithms: Continued research and development in sensor fusion techniques will lead to even better navigation accuracy and flight stability.
- Autonomous capabilities: Advancements in computer vision, machine learning, and artificial intelligence will enable more sophisticated autonomous flight modes and decision-making capabilities.
- Hardware upgrades: Future iterations of the Pixhawk 4 may incorporate more powerful processors, improved sensors, and expanded connectivity options to keep pace with the evolving needs of the drone industry.
As the Pixhawk 4 ecosystem continues to grow and mature, users can expect a steady stream of updates, enhancements, and new features that will further extend the capabilities of this advanced flight controller.
Conclusion
The Pixhawk 4 represents a significant leap forward in flight controller technology, offering a powerful, flexible, and reliable platform for high-performance drones. With its advanced hardware, extensive software support, and vibrant community, the Pixhawk 4 is well-positioned to meet the diverse needs of drone enthusiasts, professionals, and researchers alike.
As the drone industry continues to evolve and new applications emerge, the Pixhawk 4 will undoubtedly play a crucial role in enabling the next generation of autonomous aerial vehicles. Whether you are a seasoned drone pilot or just starting your journey into the world of UAVs, the Pixhawk 4 provides a solid foundation for exploring the exciting possibilities of drone technology.
Frequently Asked Questions (FAQ)
-
Q: What is the difference between the Pixhawk 4 and its predecessors?
A: The Pixhawk 4 offers several improvements over its predecessors, including a more powerful processor, expanded connectivity options, and enhanced sensor integration. It also features a redundant power supply architecture for increased reliability. -
Q: Can I use the Pixhawk 4 with both PX4 and ArduPilot software?
A: Yes, the Pixhawk 4 is compatible with both PX4 and ArduPilot flight control software, giving users the flexibility to choose the platform that best suits their needs and preferences. -
Q: What types of sensors can be connected to the Pixhawk 4?
A: The Pixhawk 4 supports a wide range of sensors, including GPS, magnetometer, barometer, accelerometer, and gyroscope. It also provides multiple connectivity options (CAN, UART, I2C, SPI) for integrating additional sensors and peripherals. -
Q: Is the Pixhawk 4 suitable for beginners, or is it only for advanced users?
A: While the Pixhawk 4 offers advanced features and capabilities, it can be used by both beginners and experienced users. The extensive documentation and community support available for the flight controller make it accessible to users with varying levels of expertise. -
Q: What are the dimensions and weight of the Pixhawk 4?
A: The Pixhawk 4 measures approximately 44mm x 84mm x 12mm and weighs around 15.8 grams (without headers). Its compact size and light weight make it suitable for integration into a wide range of drone platforms.
No responses yet